Biomechanics of Soft Bodied Organisms
Soft-bodied organisms, ranging from microscopic nematodes to giant squid, represent a vast swathe of biological diversity. Lacking the rigid internal or external skeletons common in vertebrates and arthropods, these creatures rely on unique biomechanical principles for support, movement, and interaction with their environment. Understanding the biomechanics of soft bodies is crucial not only for appreciating the ingenuity of biological evolution but also for driving innovation in fields like soft robotics, where engineers seek to replicate the compliance, adaptability, and resilience observed in nature.
This article explores the fundamental mechanical concepts governing soft-bodied organisms, their diverse locomotion strategies, the challenges in modeling their behavior, and their influence on modern engineering. The hydrostatic skeleton is a key feature, utilizing internal fluid pressure contained within muscular walls to provide structural support and facilitate movement. Unlike rigid skeletons which rely on lever systems, hydrostatic skeletons allow for highly flexible and complex deformations, enabling organisms like worms, sea anemones, and cephalopods to navigate intricate environments, manipulate objects, and withstand physical forces. The study of their biomechanics reveals intricate interplay between material properties, structural organization (like fiber reinforcement), muscle activation patterns, and environmental interactions.
The Hydrostatic Skeleton – Principles of Support and Movement
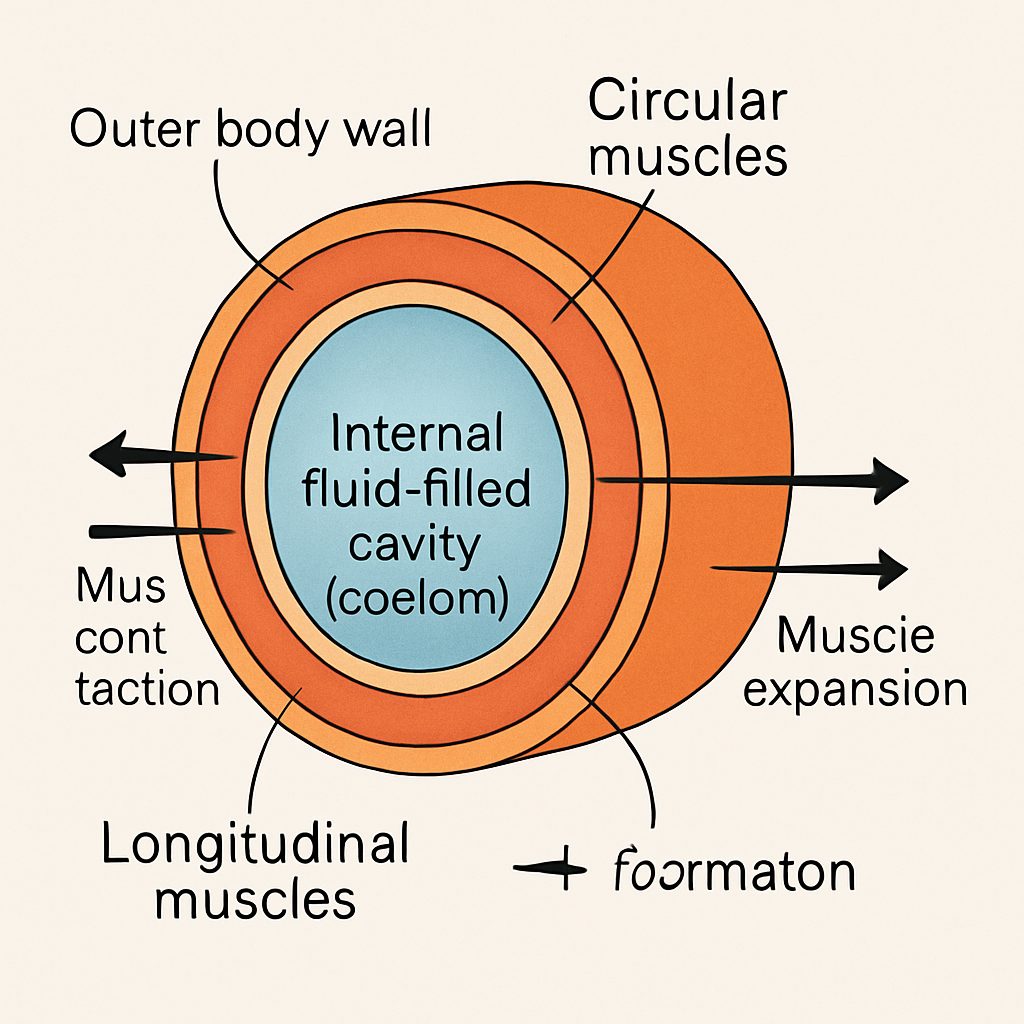
The defining characteristic of many soft-bodied animals is the hydrostatic skeleton. This system leverages Pascal's principle—pressure exerted on an enclosed, incompressible fluid is transmitted equally in all directions. Organisms maintain a constant internal volume, often within a fluid-filled cavity (coelom) or within the cellular structure itself. Muscles arranged around this volume contract against the incompressible fluid, generating internal pressure. This pressure provides the rigidity needed for support and acts as the antagonist against which other muscles can work. For instance, contraction of circular muscles decreases the diameter and increases the length, while contraction of longitudinal muscles shortens the body and increases its diameter.
Many soft structures, particularly muscular hydrostats like octopus arms, cephalopod tentacles, and elephant trunks, lack a central fluid cavity and rely on densely packed muscle tissue, which is largely water-based and thus effectively incompressible. These structures achieve remarkable dexterity through complex arrangements of muscle fibers—longitudinal, transverse, circular, and helical. Helical fiber windings are particularly significant, often found in cylindrical bodies like worms and tentacles. Specific winding angles, such as the "magic angle" around 54.7 degrees, can optimize volume retention or allow for controlled changes in length and diameter during bending and torsion. Understanding the non-linear mechanics of these fiber-reinforced biological materials is crucial for modeling their behavior and bio-inspired designs.
Advanced modeling techniques, often combining experimental data with continuum mechanics or specialized approaches like Cosserat rod theory, are employed to understand these complex systems. For example, detailed models of octopus arms incorporate hundreds of muscle groups derived from imaging data, revealing how seemingly simple muscle activation patterns can generate sophisticated 3D movements like bending, reaching, and grasping by controlling the transport and conversion of topological quantities along the arm. These models highlight the critical role of morphology and material properties in simplifying control.
Locomotion Gaits and Environmental Interaction
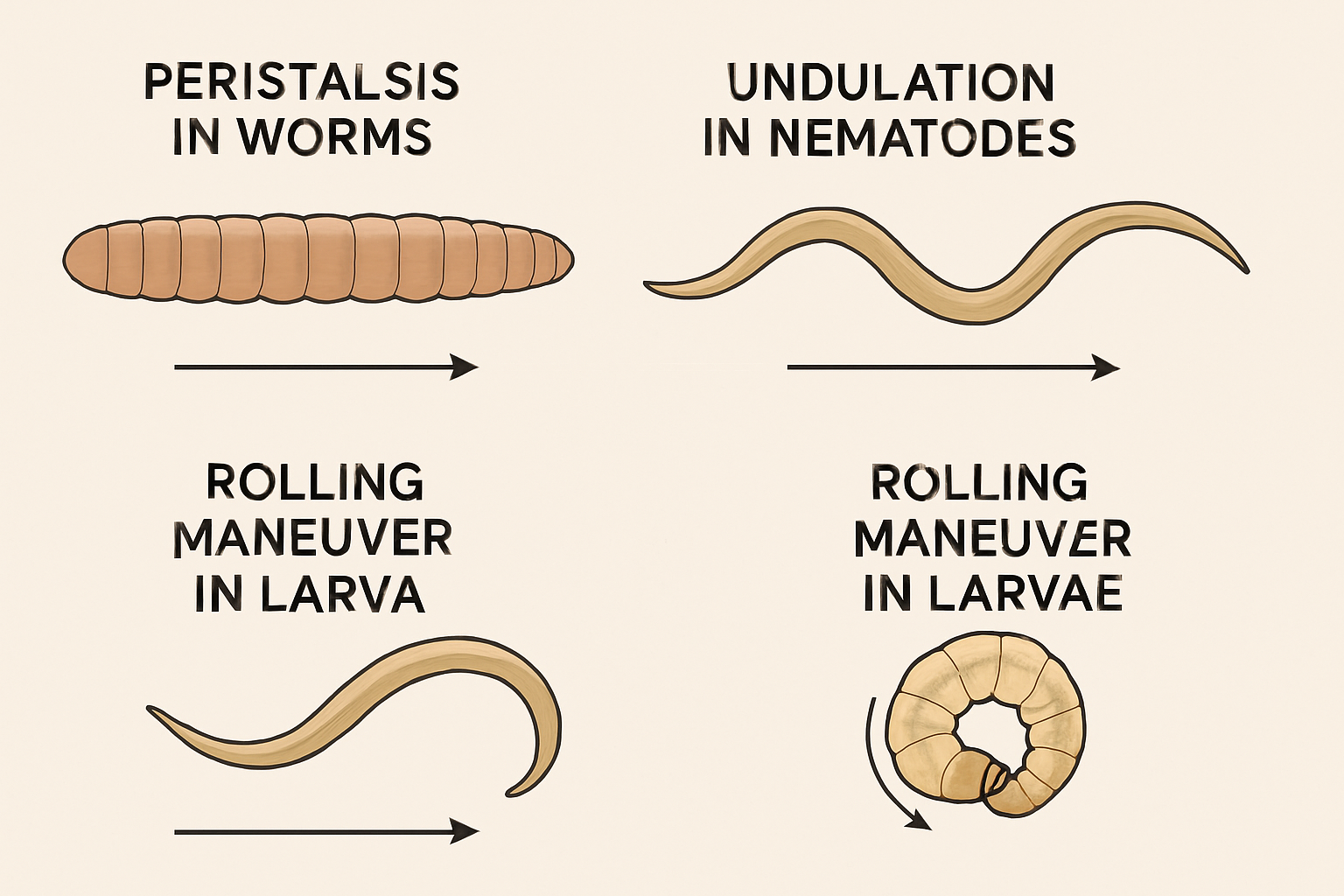
Soft-bodied organisms exhibit a remarkable diversity of locomotion strategies adapted to various environments. Peristalsis, common in earthworms and larvae, involves waves of muscle contraction and relaxation propagating along the body. These waves locally alter body shape and interact with the substrate through friction, often aided by anisotropic properties (difference in friction coefficient depending on direction of motion) provided by bristles or surface texture. Theoretical studies suggest that traveling waves of active stress are indeed an optimal strategy for maximizing displacement for a given energy input in elastic crawlers, potentially explaining the evolutionary convergence towards peristaltic gaits.
Undulation is another prevalent gait, used by nematodes, snakes, and many aquatic organisms. By propagating bending waves along their body, these animals generate propulsive forces against the surrounding medium (water or substrate). In nematodes like C. elegans, quantitative analysis reveals conserved features like normalized wavelength and a near-optimal linear relationship between propulsion velocity and muscular wave velocity, suggesting robust underlying biomechanical control principles. For aquatic undulation, factors like body flexibility, wave amplitude, frequency, and hydrodynamic interactions are critical. Studies on soft robotic snakes and fish aim to optimize these parameters for efficient swimming, often drawing inspiration from biological observations like the optimal Strouhal number range seen in efficient swimmers and flyers.
Other fascinating gaits include the rolling escape maneuver of Drosophila larvae, driven by sequential muscle activation rather than external torques, and various forms of crawling, jumping, and climbing enabled by controlled shape changes and adhesion mechanisms. Environmental interaction is paramount; organisms exploit friction, viscosity, adhesion, and buoyancy. For instance, caterpillars use prolegs for discrete contact points, manipulating friction to move, inspiring robotic designs with virtual grip mechanisms. The mechanics of interaction with granular media, fluids, or complex terrains are active areas of research, driving the development of robots capable of traversing challenging environments.
Modeling and Simulation Challenges
Accurately modeling the biomechanics of soft-bodied organisms presents significant challenges. Their ability to undergo large, non-linear deformations requires moving beyond the small-strain assumptions often used for rigid structures. Biological soft tissues exhibit complex material properties, including hyperelasticity (large elastic strains) and viscoelasticity (time-dependent behavior), which must be captured in constitutive models. Furthermore, the interaction between the deforming body and its environment, whether solid substrate or fluid, involves complex contact mechanics and fluid-structure interaction (FSI) problems.
Various computational tools are employed to tackle these challenges. Continuum mechanics provides a general framework, often implemented using the Finite Element Method (FEM). However, for slender structures like worms, tentacles, or fibers, specialized approaches like Cosserat rod theory are more computationally efficient. This theory models the deformation of a one-dimensional rod, including bending, twisting, shearing, and stretching. Recent extensions incorporate additional degrees of freedom, like cross-sectional inflation, to model the complex behavior of structures like octopus arms more accurately. Simulating FSI often requires coupling structural solvers with fluid dynamics solvers, such as vortex methods combined with immersed boundary techniques, enabling the study of aquatic locomotion or internal flows.
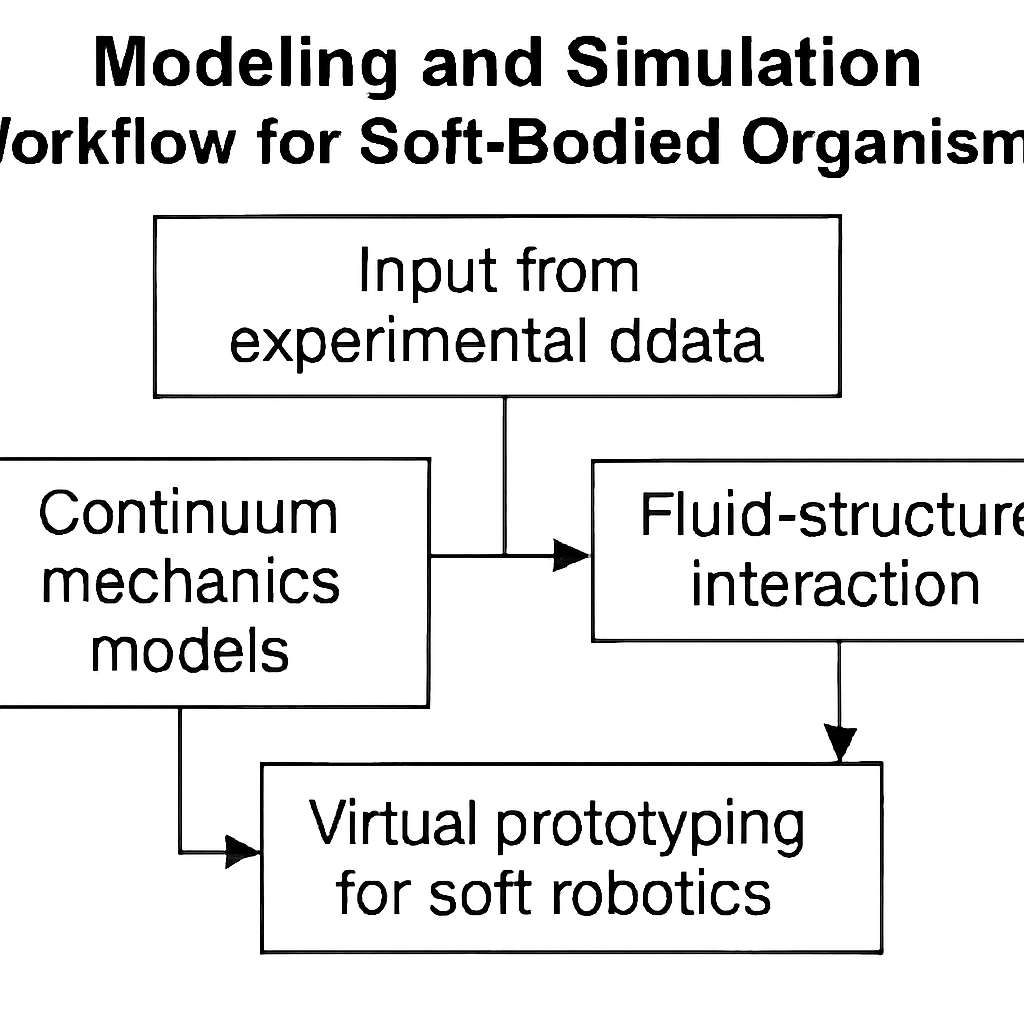
Developing accurate simulations requires careful integration of experimental data, including material characterization (e.g., from testing bio-inspired elastomers), kinematic analysis of organism movement (e.g., tracking C. elegans undulations), and muscle activity measurements. Realistic simulations are invaluable not only for understanding biological mechanics but also for designing and controlling soft robots, allowing for virtual prototyping and optimization of gaits and morphologies before physical implementation.
Bio-inspiration for Soft Robotics
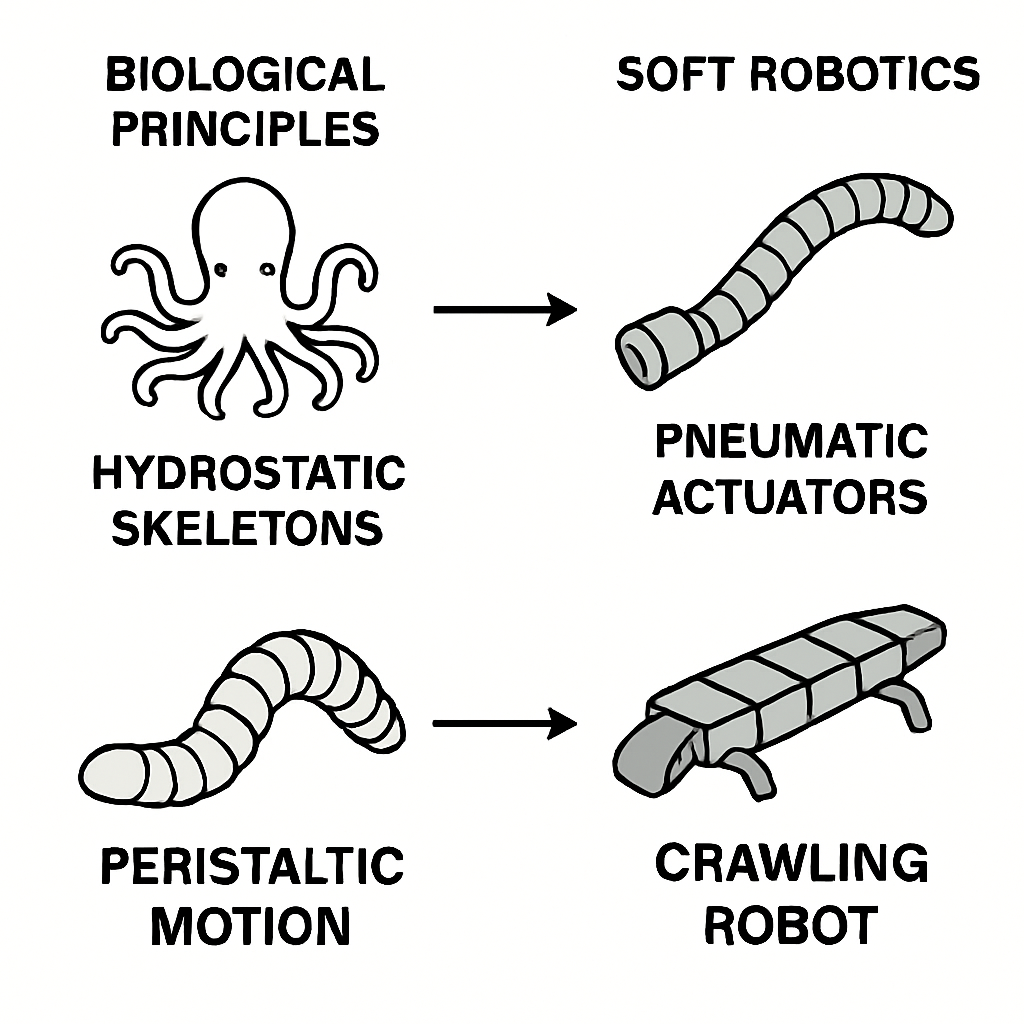
The inherent compliance, adaptability, and resilience of soft-bodied organisms make them a rich source of inspiration for the field of soft robotics. Engineers aim to replicate the functionalities enabled by hydrostatic skeletons and muscular hydrostats to create robots capable of navigating unstructured environments, interacting safely with humans, and performing delicate manipulation tasks. Actuation methods often mimic biological principles: pneumatic or hydraulic actuation replicates fluid pressure in hydrostatic skeletons, shape memory alloys or dielectric elastomers act as artificial muscles, and tendon-driven systems mimic muscle-tendon complexes.
Locomotion principles are directly transferred. Peristaltic crawlers inspired by earthworms, undulating robots mimicking snakes or eels for swimming or inspection tasks, and legged soft robots with flexible limbs demonstrate the translation of biological gaits. Designs often leverage material properties and structural features, such as using fiber reinforcement in pneumatic actuators or exploiting snapping instabilities for high-speed flapping, mirroring principles found in nature. Recent advances include untethered soft robots capable of dynamic locomotion like running and jumping, underwater gliders using soft fluidic control, and thin, compliant robots capable of navigating narrow gaps using specialized actuators and adhesion.
The octopus arm, a quintessential muscular hydrostat, inspires soft manipulator designs aiming for high dexterity and variable stiffness. Modeling insights, such as the extended Cosserat rod theory incorporating inflation, directly inform the design and control of these arms. Similarly, understanding the biomechanics of organisms like C. elegans or Drosophila larvae provides blueprints for specific robotic capabilities, such as generating efficient undulatory waves or executing rapid escape maneuvers. The development of integrated simulation tools allows for co-design of morphology, materials, and control, accelerating the creation of capable bio-inspired soft robots.
Conclusion
The biomechanics of soft-bodied organisms is a fascinating field revealing how life thrives without rigid skeletons. Principles like the hydrostatic skeleton, muscular hydrostats, complex material behavior, and sophisticated locomotion strategies enable these creatures to adapt and succeed in diverse ecological niches. Their study not only deepens our understanding of biology but also provides a powerful source of inspiration for engineering, particularly in the rapidly growing field of soft robotics. Future research will likely focus on unraveling the complexities of neuromechanical control in these organisms, developing new multi-functional soft materials, refining advanced modeling techniques to capture intricate multi-physics interactions, and translating these insights into increasingly capable and autonomous soft robotic systems for exploration, manipulation, and human assistance.
References
- Chatterjee, A., Chahare, N. R., Kondaiah, P., & Gundiah, N. (2019). Mechanics of bioinspired fiber reinforced elastomers. arXiv:1912.00989v1 [cond-mat.soft].
- Vikas, V., Templeton, P., & Trimmer, B. (2015). Design and control of a soft, shape-changing, crawling robot. arXiv:1509.07569v1 [cs.RO].
- Maksymov, I. S., & Pototsky, A. (2019). Excitation of Faraday-like body waves in vibrated living earthworms. arXiv:1912.07593v1 [cond-mat.soft].
- Tekinalp, A., Bhosale, Y., Cui, S., Chan, F. K., & Gazzola, M. (2024). Soft, slender and active structures in fluids: embedding Cosserat rods in vortex methods. arXiv:2401.09506v1 [physics.comp-ph].
- Chi, Y., Hong, Y., Zhao, Y., Li, Y., & Yin, J. (2022). Snapping for high-speed and high-efficient, butterfly swimming-like soft flapping-wing robot. arXiv:2204.05987v1 [physics.app-ph].
- Karbowski, J., Cronin, C. J., Seah, A., Mendel, J. E., Cleary, D., & Sternberg, P. W. (2006). Conservation rules, their breakdown, and optimality in Caenorhabditis sinusoidal locomotion. arXiv:q-bio/0606027v1 [q-bio.NC]. (Published in: Journal of Theoretical Biology 242, 652-669, 2006)
- Liang, X., Ding, Y., Yuan, Z., Jiang, J., Xie, Z., Fei, P., Sun, Y., Gu, G., Zhong, Z., Chen, F., Si, G., & Gong, Z. (2024). Mechanics of soft-body rolling motion without external torque. arXiv:2410.07644v1 [cond-mat.soft].
- Godage, I. S. (2019). Swimming locomotion of Soft Robotic Snakes. arXiv:1908.05250v1 [cs.RO].
- Sun, Y., Mathew, A. T., Afgan, I., Renda, F., & Laschi, C. (2024). Real-time Dynamics of Soft Manipulators with Cross-section Inflation: Application to the Octopus Muscular Hydrostat. arXiv:2412.03046v1 [cs.RO].
- Tekinalp, A., Naughton, N., Kim, S.-H., Halder, U., Gillette, R., Mehta, P. G., Kier, W., & Gazzola, M. (2023). Topology, dynamics, and control of an octopus-analog muscular hydrostat. arXiv:2304.08413v1 [cs.RO].
- Zhu, L., Cao, Y., Liu, Y., Yang, Z., & Chen, X. (2016). Architectures of Soft Robotic Locomotion Enabled by Simple Mechanical Principles. arXiv:1611.08963v1 [cond-mat.soft].
- Santhosh, S., & Serra, M. (2022). Optimal Locomotion for Limbless Crawlers. arXiv:2206.03976v1 [cond-mat.soft]. (Published in: Phys. Rev. E 106, 024610, 2022)