Biohybrid Robotics for Environmental Conservation
Biohybrid robotics, a rapidly advancing field merging living biological organisms with synthetic robotic components, presents transformative potential for environmental conservation. By integrating the inherent capabilities of living systems—such as unparalleled sensory acuity, energy efficiency, and adaptive locomotion—with the precision and control offered by robotics, scientists are developing novel tools for monitoring ecosystems, managing pollution, and studying wildlife. These systems aim to overcome the limitations of purely artificial robots, particularly in accessing complex, unstructured environments and interacting delicately with natural systems.
Environmental challenges, including climate change, biodiversity loss, and pollution, demand innovative monitoring and intervention strategies. Traditional methods often fall short due to limitations in reach, endurance, or intrusiveness. Biohybrid systems, ranging from sensor-equipped insects navigating dense foliage to bio-inspired robots interacting with aquatic life, offer promising avenues for gathering high-resolution data and performing targeted actions in previously inaccessible or sensitive ecological niches. This article explores the current state and future prospects of biohybrid robotics in addressing critical environmental conservation needs.
Leveraging Biological Locomotion and Sensing

A core advantage of biohybrid systems lies in harnessing the sophisticated locomotion and sensory capabilities honed by evolution. Insects, with their small size, agility, and diverse sensory organs, are prime candidates for biohybrid integration. Researchers have developed methods to control the movement of insects like cockroaches and beetles using implanted or non-invasive electrodes, guiding them through complex terrains or confined spaces (2410.07558, 2303.10990). For instance, streamlined cyborg cockroaches demonstrate enhanced ability to negotiate gaps, potentially useful for exploring concealed environments like pipes or vents for pollution source detection (2410.07558). Gait-adaptive algorithms are being developed to enable autonomous navigation even in challenging outdoor fields, crucial for tasks like search and rescue or locating specific environmental targets (2406.03713).
Beyond terrestrial applications, aquatic organisms like jellyfish are being explored. Jellyfish cyborgs, controlled via electrostimulation, leverage the animal's natural energy-efficient propulsion (2408.01941). By predicting and controlling their movement based on body dynamics and stimulus patterns, researchers envision using these biohybrids for large-scale ocean monitoring, mapping currents, or tracking pollution plumes with minimal energy expenditure.
The development of non-invasive interfaces, like conformal conductive membranes, aims to minimize harm to the host organism, enhancing the ethical viability and long-term deployment potential of these systems while preserving crucial sensory organs like antennae for environmental detection (2303.10990).
Miniaturized Electronics and Environmental Monitoring
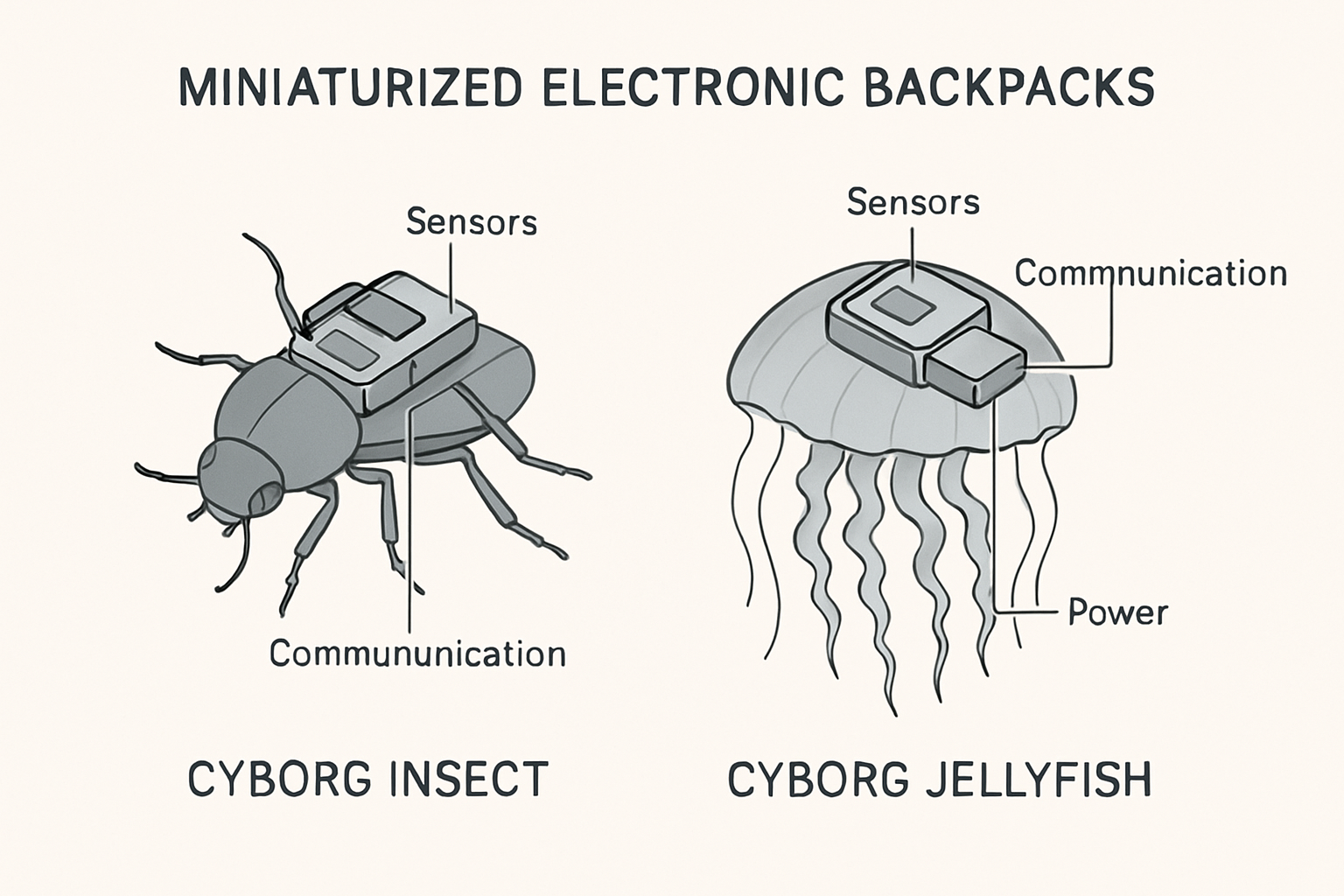
Integrating functional robotic components onto living organisms requires significant advances in miniaturized electronics, power systems, and sensor technology. The 'backpacks' carried by cyborg insects or aquatic creatures must be small and lightweight enough not to impede natural movement while housing controllers, communication modules, power sources, and environmental sensors. Recent developments include compact printed circuit boards (PCBs) capable of wireless communication (Sub-GHz) and electrical stimulation control (2410.07558). Powering these devices remains a challenge, often relying on small batteries, but research is ongoing into energy harvesting techniques.
These onboard systems enable the collection of localized, real-time environmental data. Sensors can be tailored to specific conservation goals, detecting parameters like temperature, humidity, specific chemical pollutants, radiation levels, or even acoustic signatures. For example, a swarm of sensor-equipped cyborg insects could map microclimates within a forest canopy or track the dispersal of pollutants near an industrial site (2403.17392). Similarly, jellyfish cyborgs could carry sensors to measure water quality parameters (salinity, temperature, pH, pollutants) across different depths (2408.01941). This capability for high-resolution, in-situ sensing in difficult-to-access locations offers a significant advantage over remote sensing or stationary sensor networks. Comparing these approaches to purely robotic multi-sensor systems (2404.18504) or swarm patrols (2403.01181) highlights the unique niche biohybrids can fill.
Animal-Robot Interactions and Biomimicry for Conservation
Biohybrid robotics extends beyond augmenting individual organisms to include interactions between robots and animal populations. Biomimetic robots, designed to realistically emulate animal appearance and behavior, are being used to study social dynamics and potentially influence collective behavior for conservation purposes. Researchers have quantified the 'biomimicry gap'—the difference between simulated and real-world interactions—using robotic fish lures interacting with live fish (2308.08978). Closing this gap is crucial for developing robots that can effectively and non-disruptively integrate into animal groups for monitoring or guidance.
Potential applications include using robotic lures to guide fish away from hazardous areas like dam intakes or pollution spills, or using biomimetic drones to monitor nesting bird colonies with reduced disturbance compared to human presence or conventional drones. Flapping-wing micro aerial vehicles (FWMAVs), inspired by birds and insects, are being developed with perching capabilities using soft grippers, enabling long-term, energy-efficient monitoring in sensitive habitats (2409.11921). While less directly 'biohybrid' in the sense of integrating living tissue, these biomimetic robots leverage biological principles for interaction. Understanding and navigating animal-robot interactions is key, whether augmenting an animal directly or designing a robot to operate alongside them, ensuring the technology aids rather than hinders conservation goals (2311.05069 discusses related concepts in agriculture).
Conclusion
Biohybrid robotics stands at the confluence of biology and engineering, offering innovative solutions for pressing environmental conservation challenges. By leveraging the natural advantages of living organisms in locomotion, sensing, and energy efficiency, combined with robotic control and instrumentation, these systems enable unprecedented access and data collection capabilities in diverse ecosystems. From cyborg insects navigating cluttered environments to jellyfish exploring the ocean depths and biomimetic robots interacting with wildlife, the potential applications span pollution monitoring, biodiversity assessment, habitat restoration, and wildlife management.
However, significant challenges remain. Refining control algorithms, particularly for swarms (2403.17392), developing reliable non-invasive interfaces (2303.10990), ensuring long-term power autonomy, and addressing the complex ethical considerations surrounding the use of living organisms are critical hurdles. Bridging the biomimicry gap in animal-robot interactions (2308.08978) is also essential for effective field deployment. Future research must focus on robust field validation, improved system integration, and establishing clear ethical guidelines to ensure biohybrid robotics develops into a responsible and impactful tool for safeguarding our planet's natural resources.
References
- Owaki, D., Austin, M., Ikeda, S., Okuizumi, K., & Nakajima, K. (2024). A Jellyfish Cyborg: Exploiting Natural Embodied Intelligence as Soft Robots. arXiv:2408.01941v2 [cs.RO].
- Kai, K., Long, L. D., & Sato, H. (2024). Streamlined shape of cyborg cockroach promotes traversability in confined environments by gap negotiation. arXiv:2410.07558v1 [cs.RO].
- Papaspyros, V., Theraulaz, G., Sire, C., & Mondada, F. (2023). Quantifying the biomimicry gap in biohybrid robot-fish pairs. arXiv:2308.08978v2 [cs.RO].
- Lin, Q., Li, R., Zhang, F., Kazuki, K., Chen, O. Z., Chen, X., & Sato, H. (2023). Resilient conductive membrane synthesized by in-situ polymerisation for wearable non-invasive electronics on moving appendages of cyborg insect. arXiv:2303.10990v1 [cs.RO].
- Bai, Y., Tran Ngoc, P. T., Nguyen, H. D., Le, D. L., Ha, Q. H., Kai, K., See To, Y. X., Deng, Y., Song, J., Wakamiya, N., Sato, H., & Ogura, M. (2024). Swarm navigation of cyborg-insects in unknown obstructed soft terrain. arXiv:2403.17392v3 [cs.RO].
- York, C., Madin, Z. R., O'Dowd, P., & Hunt, E. R. (2024). Shaping Multi-Robot Patrol Performance with Heterogeneity in Individual Learning Behavior. arXiv:2403.01181v1 [cs.RO]. (DOI: 10.1109/ICDL61372.2024.10645013)
- Broers, K. C. V., & Armanini, S. F. (2024). Repeatable Energy-Efficient Perching for Flapping-Wing Robots Using Soft Grippers. arXiv:2409.11921v1 [cs.RO].
- Tran-Ngoc, P. T., Nguyen, H. D., Le, D. L., Li, R., Chong, B. S., & Sato, H. (2024). Gait-Adaptive Navigation and Human Searching in field with Cyborg Insect. arXiv:2406.03713v1 [cs.RO].
- Tschaikner, M., Brandt, D., Schmidt, H., Bießmann, F., Chiaburu, T., Schrimpf, I., Schrimpf, T., Stadel, A., Haußer, F., & Beckers, I. (2024). Multisensor Data Fusion for Automatized Insect Monitoring (KInsecta). arXiv:2404.18504v1 [cs.LG]. (DOI: 10.1117/12.2679927)
- Ozenturk, U., Chen, Z., Jamone, L., & Versace, E. (2023). Robotics for poultry farming: challenges and opportunities. arXiv:2311.05069v1 [cs.RO].