Bio-Inspired Soft Robotics for Environmental Monitoring
Environmental monitoring is crucial for understanding climate change impacts, tracking pollution, assessing biodiversity, and managing natural resources. Traditional monitoring often relies on static sensor networks or rigid, human-operated vehicles, which can be limited in accessibility, deployability, and interaction safety within delicate ecosystems. Soft robotics, a field focused on creating robots from compliant materials, offers a promising alternative. By drawing inspiration from biological organisms that have evolved to thrive in diverse and complex environments, bio-inspired soft robotics aims to develop robots with unprecedented adaptability, maneuverability, and safety.
These bio-inspired soft robots can mimic the forms and functions of natural systems, enabling them to navigate challenging terrains, interact gently with their surroundings, and potentially carry sophisticated sensor payloads. Their inherent compliance reduces the risk of damage to both the environment and the robot itself, making them ideal candidates for monitoring fragile ecosystems like coral reefs, wetlands, or dense forests. This article explores the intersection of bio-inspiration and soft robotics, focusing on technologies enabling locomotion, sensing, and design strategies pertinent to environmental monitoring applications.
Biomimetic Locomotion for Diverse Environments
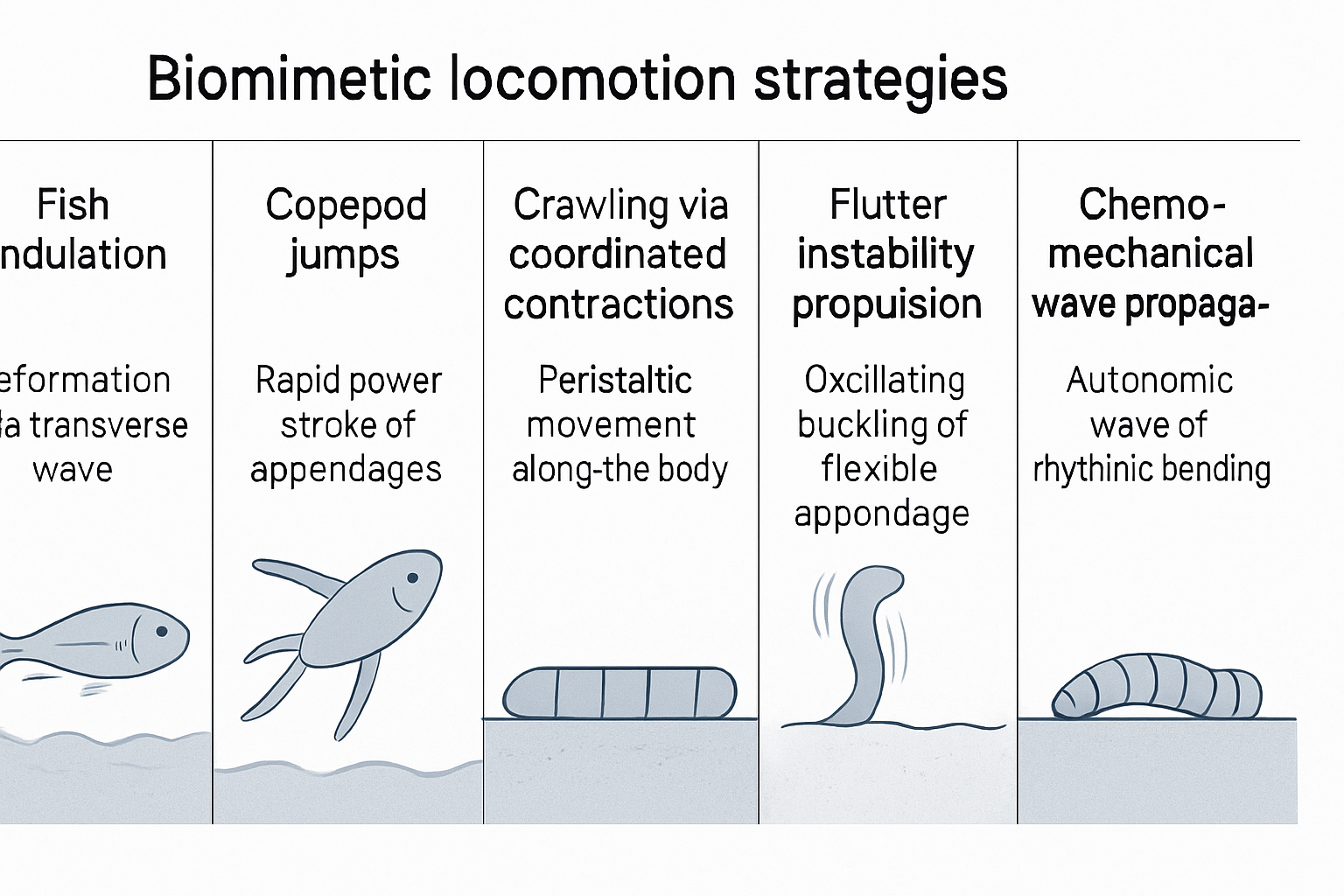
Nature provides a rich library of locomotion strategies optimized for specific environments. Bio-inspired soft robots leverage these biological blueprints to achieve movement in ways traditional rigid robots cannot. For aquatic monitoring, designs mimicking fish or other marine organisms are prevalent. For instance, the OpenFish project showcases a soft robotic fish optimized for speed and efficiency using an active and passive tail, achieving high speeds suitable for covering larger areas or countering currents (van den Berg et al., arXiv:2108.12285v2). Other approaches mimic the explosive, curved jumps of copepods for rapid, precise movements or repositioning in underwater environments (He et al., arXiv:2302.08217v2). Manta-ray-inspired robots utilizing flapping fins actuated by dielectric elastomers demonstrate capabilities for both underwater swimming and surface skating, enhancing versatility (Zhang et al., arXiv:2310.11426v2).
Beyond swimming, inspiration comes from other modes of movement. Crawling locomotion, inspired by organisms like larvae, can be achieved through coordinated contractions learned via algorithms like reinforcement learning, potentially enabling robots to traverse complex terrestrial or benthic surfaces (Mishra et al., arXiv:2003.12845v2). Some designs even harness physical phenomena like flutter instability, observed in flagellar locomotion, to create self-propelling swimmers using minimal actuation from uniform external fields, offering pathways for micro-scale robots or low-energy designs (Boiardi & Noselli, arXiv:2408.02560v1). The propagation of chemo-mechanical waves on deformable surfaces, inspired by biological processes, shows potential for creating autonomously moving devices where geometry dictates movement (Miller et al., arXiv:1710.02247v3). These diverse locomotion strategies allow soft robots to access environments previously unreachable by conventional technology, from deep-sea vents to intricate plant canopies.
Integrated Sensing for Data Acquisition
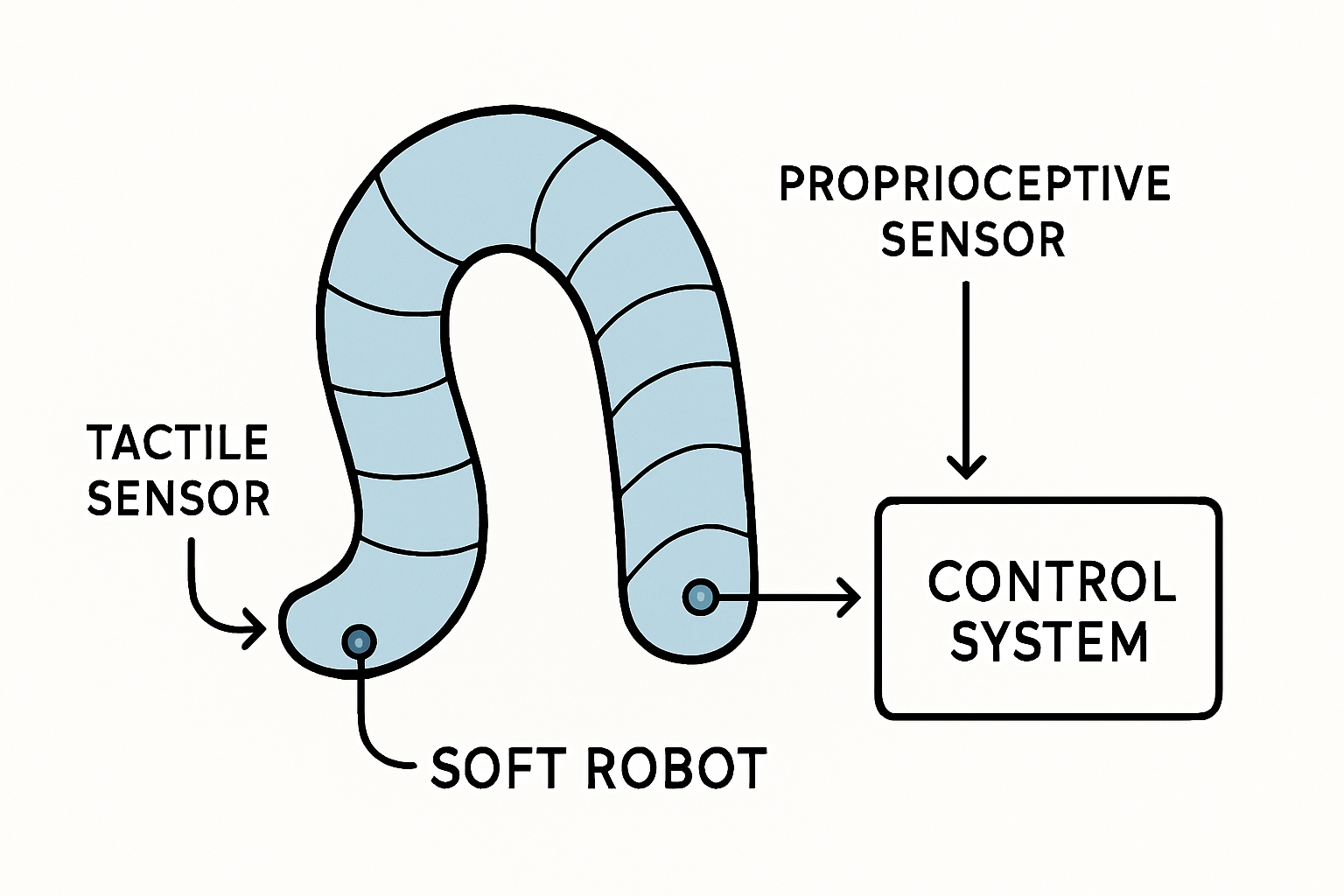
Effective environmental monitoring requires robust sensing capabilities to gather data about physical, chemical, and biological parameters. Bio-inspired soft robots offer unique platforms for integrating sensors directly into their compliant bodies. Tactile sensing, mimicking the human sense of touch, is particularly relevant for robots designed to interact with their environment, perhaps for sample collection or navigating cluttered spaces. The TacTip sensor, an optical tactile sensor inspired by skin morphology, demonstrates how high-resolution touch data can be integrated into soft robotic hands for control and perception (Lepora, arXiv:2105.14455v2; Lepora et al., arXiv:2102.03318v1). Such capabilities could allow robots to gently manipulate objects or assess substrate characteristics.
Proprioception, the sense of self-movement and body position, is crucial for controlling locomotion and interaction. Integrating sensors like capacitive flex sensors within the soft structure, as demonstrated in the SoPrA arm, allows for real-time pose estimation and even external force sensing without relying on external cameras (Toshimitsu et al., arXiv:2103.10726v3). This is vital for navigating complex, visually obstructed environments common in environmental monitoring scenarios. Furthermore, the development of ionic circuits within soft materials opens possibilities for purely soft systems capable of sensing chemical changes (e.g., salinity, pollutants), processing signals, and actuating responses, potentially leading to autonomous robots that adapt behaviour based on environmental cues (Tepermeister & Silberstein, arXiv:2410.04310v2).
Design Principles and Material Innovation
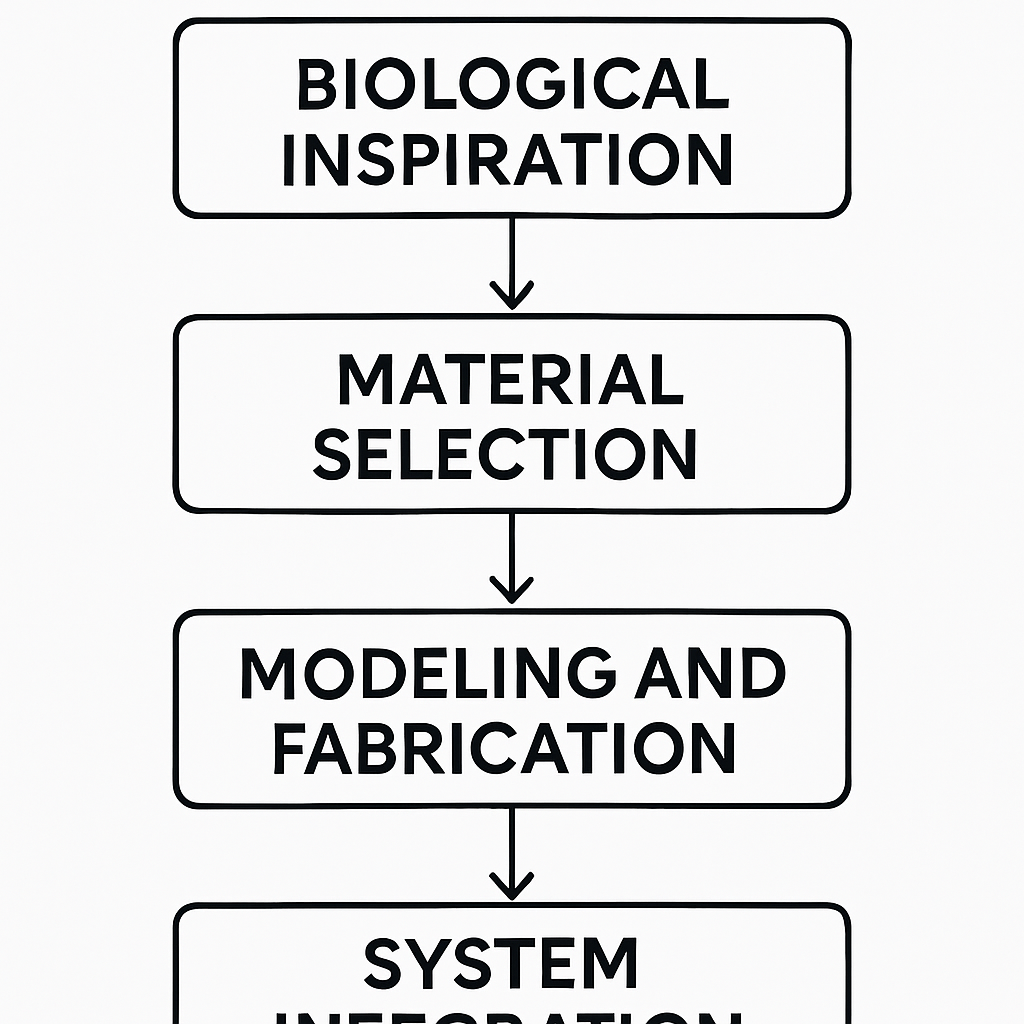
Creating effective bio-inspired soft robots necessitates novel design approaches and material systems. Simply mimicking biological form is often insufficient; understanding the underlying functional principles is key. For example, leveraging elastic instabilities, like the snap-through action of a hairclip, can produce rapid movements for high-speed swimming, overcoming traditional speed limitations of soft actuators (Xiong et al., arXiv:2207.08348v7). Designs may focus on minimalism, like entirely soft robots made of dielectric elastomers without conventional electronics, showcasing the potential for biodegradable or highly resilient systems (Henke et al., arXiv:1603.05599v1).
Advanced modeling and fabrication techniques are crucial enablers. 4D topology optimization, which considers the time dimension, allows for the simultaneous design of a soft robot's structure and its self-actuation pattern to achieve specific dynamic tasks like locomotion or posture control, leading to complex, biomimetic movements (Yuhn et al., arXiv:2302.00905v3). Material innovation, such as using polyelectrolyte hydrogels that respond to electric fields (Boiardi & Noselli, arXiv:2408.02560v1) or dielectric elastomers for actuation (Zhang et al., arXiv:2310.11426v2), provides the building blocks for these robots. Open-source hardware initiatives, like OpenFish, also play a role by democratizing access to designs and accelerating research progress (van den Berg et al., arXiv:2108.12285v2). The combination of bio-inspired principles, advanced materials, and sophisticated design tools drives the development of increasingly capable soft robots.
Conclusion
Bio-inspired soft robotics holds significant potential to revolutionize environmental monitoring. By mimicking the locomotion and sensing strategies honed by evolution and utilizing compliant materials, these robots offer advantages in accessing challenging environments, interacting safely with delicate ecosystems, and potentially enabling persistent, autonomous data collection. Innovations in biomimetic locomotion allow navigation through diverse media, while integrated soft sensors provide crucial data about the robot's state and its surroundings. Advanced design methodologies and novel materials continue to push the boundaries of what is possible.
Future work will likely focus on enhancing autonomy through onboard power and control, developing biodegradable materials to minimize environmental impact, improving multi-modal sensing capabilities (chemical, biological, physical), and deploying multi-robot systems for large-scale monitoring tasks. Addressing challenges related to power density, long-term durability in harsh conditions, and robust autonomous control will be critical. As these technologies mature, bio-inspired soft robots promise to become invaluable tools for scientists seeking to understand and protect our planet's complex ecosystems.
References
- van den Berg, S. C., Scharff, R. B. N., Rusák, Z., & Wu, J. (2022). OpenFish: Biomimetic Design of a Soft Robotic Fish for High Speed Locomotion. arXiv:2108.12285v2.
- Henke, E. -F. M., Schlatter, S., & Anderson, I. A. (2016). A Soft Electronics-Free robot. arXiv:1603.05599v1.
- He, Z., Yang, Y., Jiao, P., Wang, H., Lin, G., & Pähtz, T. (2023). Copebot: Underwater soft robot with copepod-like locomotion. arXiv:2302.08217v2.
- Wang, H., Xu, H., & Meng, Y. (2022). Biomimetic Evaluation of an Underwater Soft Hand Through Deep Learning-based 3D Pose Reconstruction. arXiv:2203.08550v1.
- Boiardi, A. S., & Noselli, G. (2024). Minimal actuation and control of a soft hydrogel swimmer from flutter instability. arXiv:2408.02560v1.
- Lepora, N. F., Stinchcombe, A., Ford, C., Brown, A., Lloyd, J., Catalano, M. G., Bianchi, M., & Ward-Cherrier, B. (2021). Towards integrated tactile sensorimotor control in anthropomorphic soft robotic hands. arXiv:2102.03318v1.
- Toshimitsu, Y., Wong, K. W., Buchner, T., & Katzschmann, R. (2021). SoPrA: Fabrication & Dynamical Modeling of a Scalable Soft Continuum Robotic Arm with Integrated Proprioceptive Sensing. arXiv:2103.10726v3.
- Lepora, N. F. (2021). Soft Biomimetic Optical Tactile Sensing with the TacTip: A Review. arXiv:2105.14455v2.
- Zhang, C., Zhang, C., Qu, J., & Qian, X. (2023). Underwater and Surface Aquatic Locomotion of Soft Biomimetic Robot Based on Bending Rolled Dielectric Elastomer Actuators. arXiv:2310.11426v2.
- Miller, P. W., Stoop, N., & Dunkel, J. (2018). Geometry of wave propagation on active deformable surfaces. arXiv:1710.02247v3.
- Mishra, S., van Rees, W. M., & Mahadevan, L. (2020). Coordinated Crawling via Reinforcement Learning. arXiv:2003.12845v2.
- Xiong, Z., Chen, L., Hao, W., Su, Y., & Lipson, H. (2022). Fast Swimming Robots Based on Elastic Instability. arXiv:2207.08348v7.
- Yuhn, C., Sato, Y., Kobayashi, H., Kawamoto, A., & Nomura, T. (2023). 4D topology optimization: Integrated optimization of the structure and self-actuation of soft bodies for dynamic motions. arXiv:2302.00905v3.
- Tepermeister, M., & Silberstein, M. N. (2024). Harnessing Ionic Complexity: A Modeling Approach for Hierarchical Ionic Circuit Design. arXiv:2410.04310v2.