Bio-Inspired Robotics: Revolutionizing Search and Rescue Operations
Amidst escalating environmental disasters and complex urban catastrophes, search and rescue (SAR) operations have never been more crucial, nor more hazardous for human responders. Traditional robotics has advanced the field, but natural systems, honed by millions of years of evolution, continue to outperform machines in adaptability, resilience, and efficiency when confronting unpredictable, unstructured terrains.
Enter bio-inspired robotics—a rapidly growing discipline that leverages biological principles and morphologies from nature to imbue robotic systems with unprecedented agility, flexibility, and intelligence. As the latest research demonstrates, the fusion of nature’s blueprints with cutting-edge engineering is reimagining the frontier of disaster response. This article explores recent advances in bio-inspired robotics and their transformative potential for search and rescue scenarios.
Designing Robots for the Unknown—Nature as the Ultimate Engineer
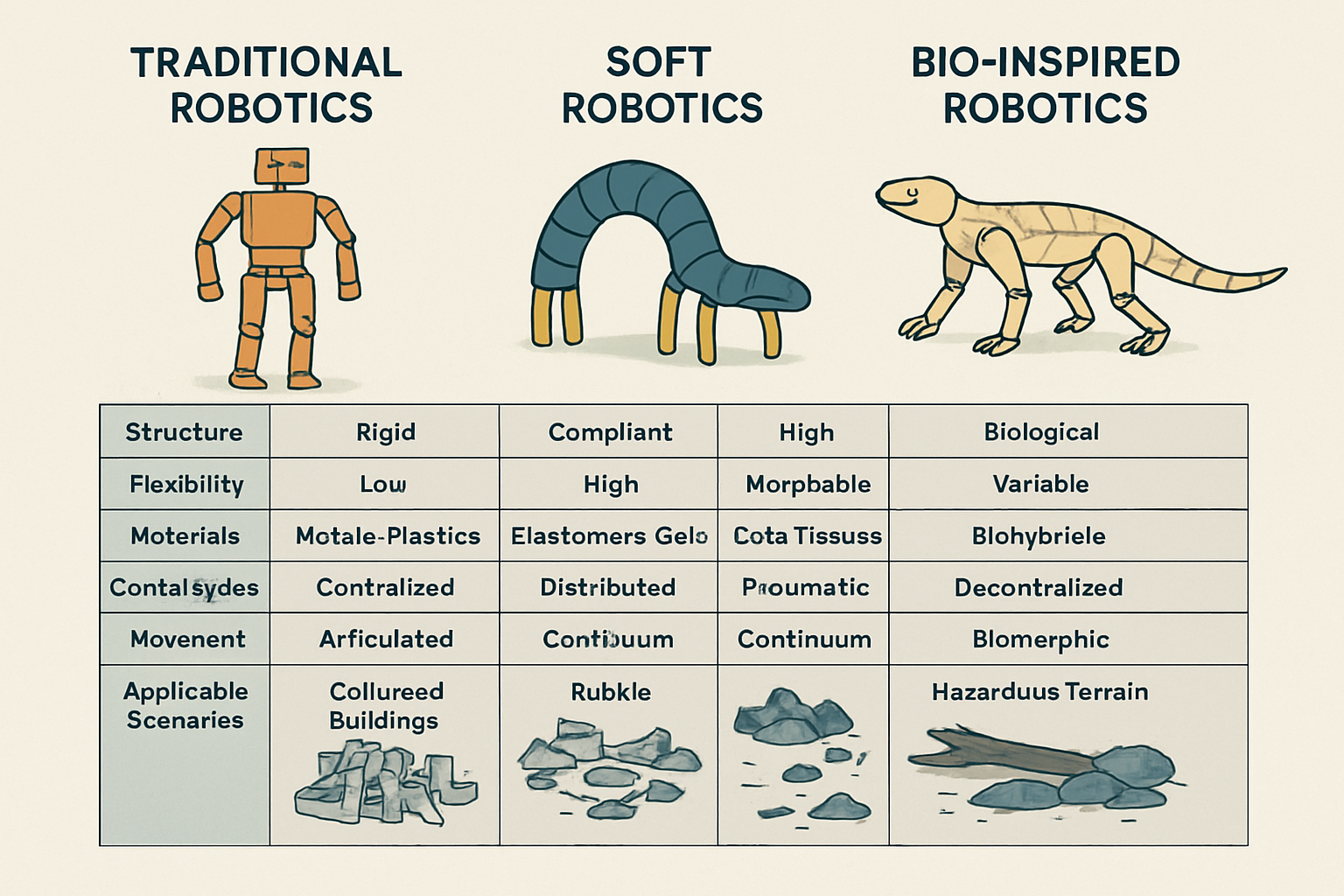
Nature has evolved a dizzying array of solutions to survival in hostile and variable environments. From the climbing prowess of geckos and the burrowing finesse of worms to the collective organization of swarms, each adaptation offers inspiration for engineers seeking to transcend the limitations of conventional robots. The field of soft robotics, for instance, draws heavily from organisms such as octopuses, snakes, and vines, resulting in robots that can deform, squeeze, and navigate through rubble that would immobilize rigid machines. According to Sebastian (2025), soft robots—thanks to their bio-inspired morphologies and advanced materials—demonstrate superior adaptability and safety, capable of crawling, rolling, and morphing shape to traverse complex disaster environments [1].
Recent field experiments (McFarland et al., 2024) with “vine” robots confirm that these soft, tip-growing systems can navigate collapsed structures, squeezing through narrow voids and around corners—tasks nearly impossible for traditional rescue robotics [2]. While soft robots bring new challenges in power management and sensor integration, the synergy of flexible materials and nature-inspired motion is reshaping what is possible when searching for survivors in tight, unstable spaces.
Additionally, biomimetic advancements are not limited to ground robots. Aerial robots with morphing wings (Pons & Cirak, 2023) now demonstrate flight characteristics and maneuverability reminiscent of birds, enabling them to access and survey disaster zones with unrivaled agility [3]. These breakthroughs highlight that, by emulating nature, roboticists are unlocking new operational theatres for rescue technology.
Multi-Agent Intelligence—Swarm Robotics and Team Coordination
Beyond individual morphology, biological systems also offer crucial templates for cooperative behavior. Ants, bees, and fish schools coordinate search patterns, allocate resources, and adapt to changing conditions with remarkable efficiency. Translating these decentralized, swarm-like strategies into robotics has led to robust platforms for large-scale SAR missions.
Recent work (Hunt et al., 2023) illustrates the performance gains of “human-in-the-loop” swarm control, where human operators supervise semi-autonomous robot swarms conducting search and resource allocation [4]. Simulated and field studies consistently show that maintaining a balance of autonomy with centralized human oversight can yield faster victim detection and greater resiliency in complex, dynamic settings.
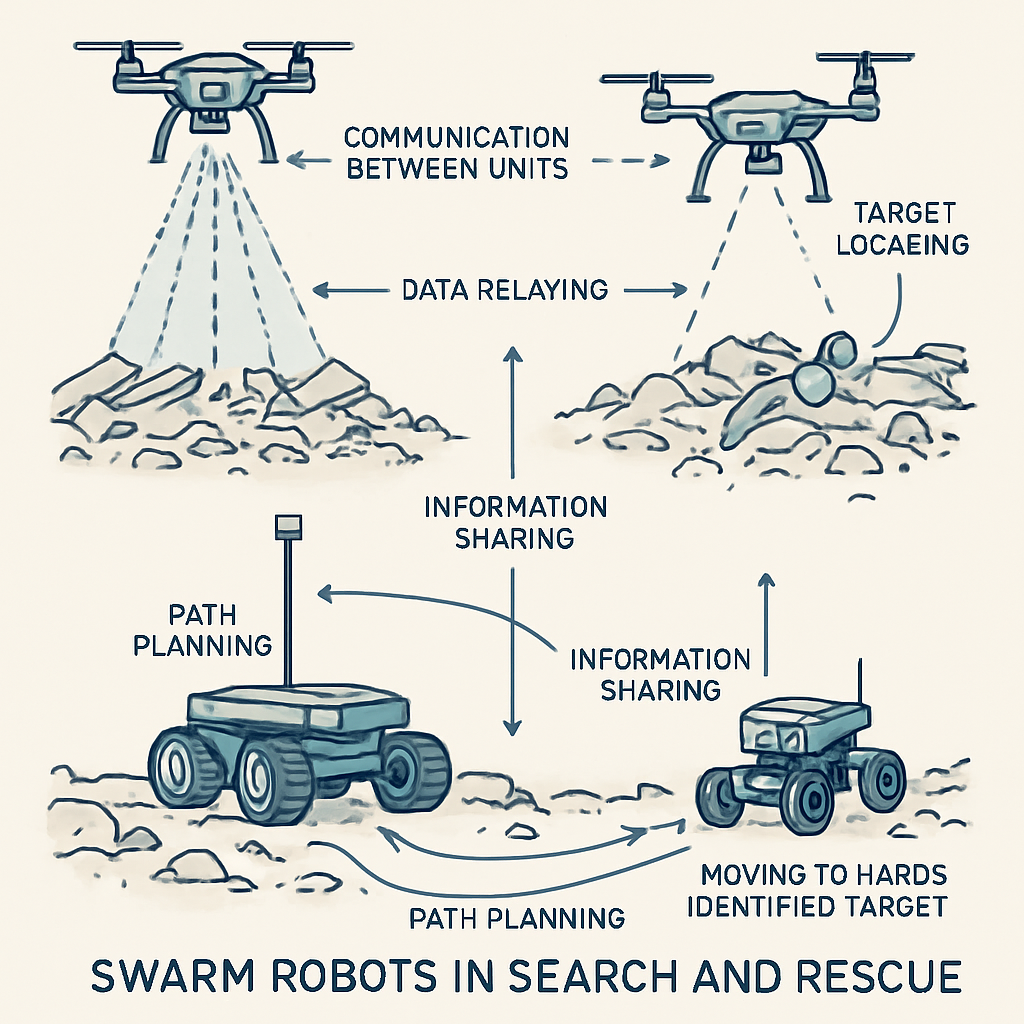
On the hardware side, new multi-robot frameworks incorporate both terrestrial and aerial agents with heterogeneous capabilities, leveraging model predictive control and real-time mapping to optimize territorial coverage and task allocation (Shamsah et al., 2024) [5]. This team-based, bio-inspired approach—where ground robots traverse complex terrain while aerial drones provide situational awareness and communication relays—mirrors nature’s division of labor and flexible formation strategies. Such approaches have demonstrated dramatic increases in efficiency and safety compared to single-agent or rigidly programmed multi-robot systems.
Sensing, Interaction, and Human-Robot Teams
One of nature’s unrivaled gifts is the sophistication of sensing and environmental perception. Biomimetic research in tactile sensing, using skin-inspired materials and neural encoding, equips robots with heightened dexterity and sensitivity—critical for manipulating rubble and safely extracting survivors (Pestell et al., 2022) [6]. Furthermore, biomimetic manipulation systems, such as anthropomorphic arms replicating the biomechanics of the human shoulder (Yang et al., 2023), can perform tasks once reserved for human rescuers but from safe distances [7].
Yet, robust SAR operations depend on seamless human-robot collaboration. Despite technological advances, the limited adoption of robots in real-world disasters often stems from challenges in human-robot interaction (Hoque et al., 2024) [8]. Augmented reality interfaces and multimodal communication systems (Nalamothu et al., 2024) are emerging to bridge this gap, enhancing situational awareness and facilitating intuitive teamwork under stress. Open-source simulation and training environments, like HEROES, enable first responders to prepare with realistic robot teammates, further closing the gap between theory and practice [9].
Remaining Challenges and the Road Ahead
Although the potential of bio-inspired robotics for SAR operations is vast, formidable challenges remain. Material durability, energy autonomy, miniaturization, and robust sensing still lag behind their biological inspirations. Moreover, ethical and operational considerations, including fairness, privacy, and reliable human oversight, must be carefully addressed as robotic systems gain greater autonomy and access to disaster zones [10][11].
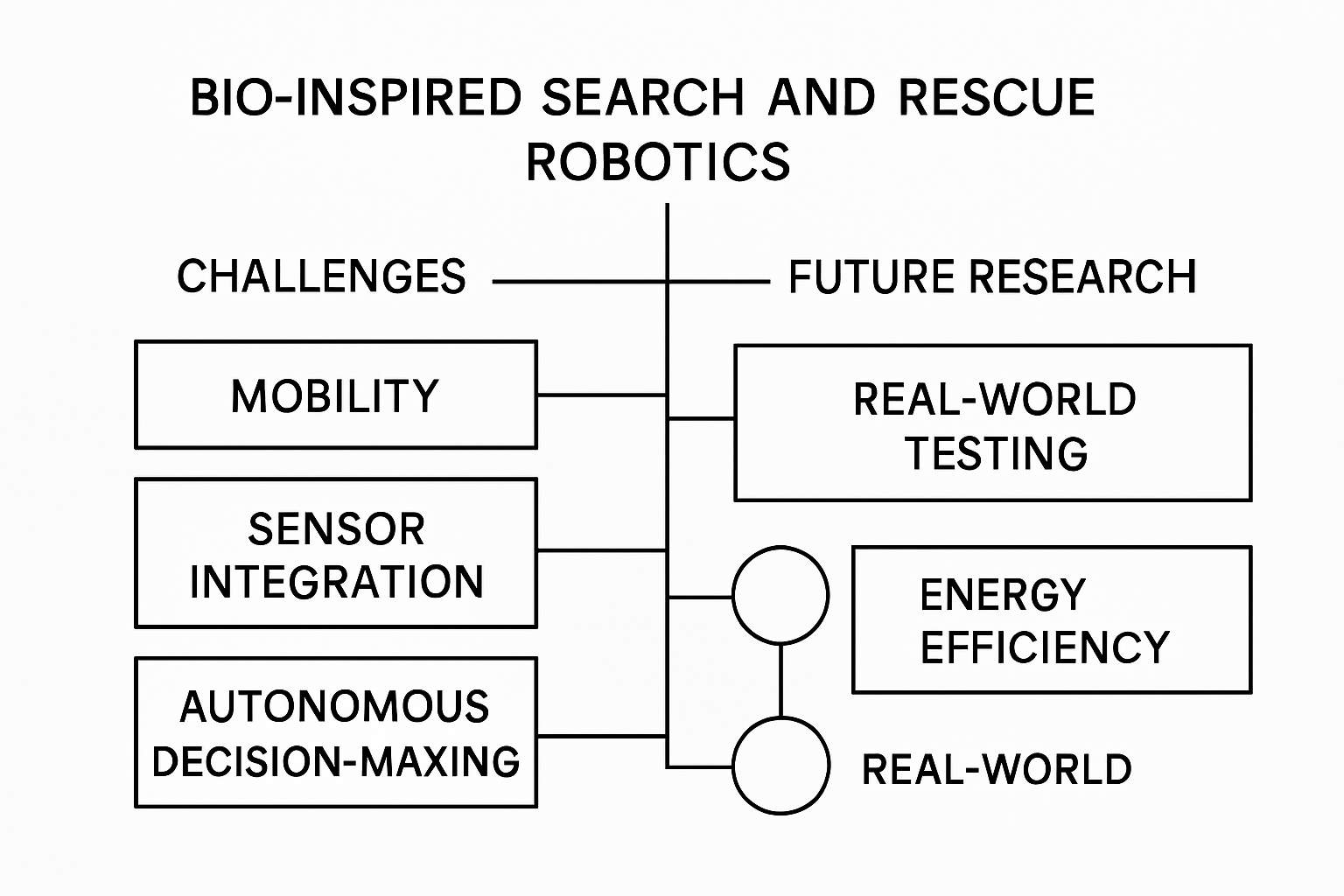
Recent developments in simulation, machine learning, and open-source system integration are accelerating progress across these fronts. The trajectory is clear: interdisciplinary collaboration and continued innovation will yield robotic systems that are not only capable of surviving the chaos of disaster environments, but of collaborating, adapting, and ultimately saving lives in ways once thought possible only for living creatures.
Conclusion
Nature’s engineering remains the pinnacle of functional, adaptive design. As bio-inspired robotics matures, it is steadily transforming the practice of search and rescue—making operations safer, faster, and more effective. From soft-bodied explorers and aerial morphing scouts to swarms and tactile manipulators, the marriage of biological principles with advanced robotics is pushing the boundaries of what machines can achieve in disaster response. The coming decade promises agile, responsive, and truly collaborative robotic partners in the world’s most dangerous places—heralding a new era in humanitarian technology.
References
- Sebastian, A. (2025). Soft Robotics for Search and Rescue: Advancements, Challenges, and Future Directions. https://arXiv:2502.12373v1
- McFarland, C., Dhawan, A., et al. (2024). Field Insights for Portable Vine Robots in Urban Search and Rescue. https://arXiv:2411.06615v1
- Pons, A. & Cirak, F. (2023). Multiaxis nose-pointing-and-shooting in a biomimetic morphing-wing aircraft. https://arXiv:2201.03601v1
- Hunt, W., Ryan, J., et al. (2023). Demonstrating Performance Benefits of Human-Swarm Teaming. https://arXiv:2303.12390v2
- Shamsah, A., Jiang, J., et al. (2024). Terrain-Aware Model Predictive Control of Heterogeneous Bipedal and Aerial Robot Coordination for Search and Rescue Tasks. https://arXiv:2409.15174v1
- Pestell, N., Griffith, T., Lepora, N.F. (2022). Artificial SA-I and RA-I Afferents for Tactile Sensing of Ridges and Gratings. https://arXiv:2107.02084v3
- Yang, H., Wei, G., Ren, L. (2023). Development and Characteristics of a Highly Biomimetic Robotic Shoulder Through Bionics-Inspired Optimization. https://arXiv:2310.18283v1
- Hoque, S., Riya, F.F., Sun, J. (2024). HRI Challenges Influencing Low Usage of Robotic Systems in Disaster Response and Rescue Operations. https://arXiv:2401.15760v1
- Chaudhary, A., Tiwari, K., Bera, A. (2025). HEROES: Unreal Engine-based Human and Emergency Robot Operation Education System. https://arXiv:2309.14508v2
- Brandao, M. (2020). Fair navigation planning: a humanitarian robot use case. https://arXiv:2006.14479v1
- Ruan, T., Wang, H., et al. (2022). A Taxonomy of Semantic Information in Robot-Assisted Disaster Response. https://arXiv:2210.00125v1